Vision Transformer (二)
Attention
原文地址:https://zhuanlan.zhihu.com/p/342261872
Transformer+Classification:用于分类任务的 Transformer(ICLR2021)¶
论文名称:An Image is Worth 16x16 Words:Transformers for Image Recognition at Scale
论文地址:
https://arxiv.org/abs/2010.11929
- 5.1 ViT 原理分析:
这个工作本着尽可能少修改的原则,将原版的 Transformer 开箱即用地迁移到分类任务上面。并且作者认为没有必要总是依赖于 CNN,只用 Transformer 也能够在分类任务中表现很好,尤其是在使用大规模训练集的时候。同时,在大规模数据集上预训练好的模型,在迁移到中等数据集或小数据集的分类任务上以后,也能取得比 CNN 更优的性能。下面看具体的方法:
图片预处理:分块和降维
这个工作首先把\(\text{x}\in H\times W\times C\) 的图像,变成一个 \(\text{x}_p\in N\times (P^2\cdot C)\) 的 sequence of flattened 2D patches。它可以看做是一系列的展平的 2D 块的序列,这个序列中一共有 \(N=HW/P^2\) 个展平的 2D 块,每个块的维度是 \((P^2\cdot C)\) 。其中 \(P\) 是块大小, \(C\) 是 channel 数。
注意作者做这步变化的意图: 根据我们之前的讲解 ,Transformer 希望输入一个二维的矩阵 \((N,D)\) ,其中 \(N\) 是 sequence 的长度, \(D\) 是 sequence 的每个向量的维度,常用 256。
所以这里也要设法把 \(H\times W\times C\) 的三维图片转化成 \((N,D)\) 的二维输入。
所以有: \(H\times W\times C\rightarrow N\times (P^2\cdot C),\text{where}\;N=HW/P^2\) 。
其中,\(N\) 是 Transformer 输入的 sequence 的长度。
代码是:
x = rearrange(img, 'b c (h p1) (w p2) -> b (h w) (p1 p2 c)', p1=p, p2=p)
具体是采用了 einops 库实现,具体可以参考这篇博客。
科技猛兽:PyTorch 70.einops:优雅地操作张量维度
现在得到的向量维度是: \(\text{x}_p\in N\times (P^2\cdot C)\) ,要转化成 \((N,D)\) 的二维输入,我们还需要做一步叫做 Patch Embedding 的步骤。
Patch Embedding¶
方法是对每个向量都做一个线性变换(即全连接层),压缩后的维度为 \(D\) ,这里我们称其为 Patch Embedding。
这个全连接层就是上式 (5.1) 中的 \(\color{crimson}{\mathbf{E}}\) ,它的输入维度大小是 \((P^2\cdot C)\) ,输出维度大小是 \(D\)。
# 将3072变成dim,假设是1024
self.patch_to_embedding = nn.Linear(patch_dim, dim)
x = self.patch_to_embedding(x)
注意这里的绿色字体 \(\color{darkgreen}{\mathbf{x}_\text{class}}\) ,假设切成 9 个块,但是最终到 Transfomer 输入是 10 个向量,这是人为增加的一个向量。
为什么要追加这个向量?
如果没有这个向量,假设 \(N=9\) 个向量输入 Transformer Encoder,输出 9 个编码向量,然后呢?对于分类任务而言,我应该取哪个输出向量进行后续分类呢?
不知道。干脆就再来一个向量 \(\color{darkgreen}{\mathbf{x}_\text{class}}(\text{vector,dim}=D)\) ,这个向量是可学习的嵌入向量,它和那 9 个向量一并输入 Transfomer Encoder,输出 1+9 个编码向量。然后就用第 0 个编码向量,即 \(\color{darkgreen}{\mathbf{x}_\text{class}}\) 的输出进行分类预测即可。
这么做的原因可以理解为:ViT 其实只用到了 Transformer 的 Encoder,而并没有用到 Decoder,而 \(\color{darkgreen}{\mathbf{x}_\text{class}}\) 的作用有点类似于解码器中的 \(\text{Query}\) 的作用,相对应的 \(\text{Key,Value}\) 就是其他 9 个编码向量的输出。
\(\color{darkgreen}{\mathbf{x}_\text{class}}\) 是一个可学习的嵌入向量,它的意义说通俗一点为:寻找其他 9 个输入向量对应的 \(\text{image}\) 的类别。
代码为:
# dim=1024
self.cls_token = nn.Parameter(torch.randn(1, 1, dim))
# forward前向代码
# 变成(b,64,1024)
cls_tokens = repeat(self.cls_token, '() n d -> b n d', b=b)
# 跟前面的分块进行concat
# 额外追加token,变成b,65,1024
x = torch.cat((cls_tokens, x), dim=1)
Positional Encoding¶
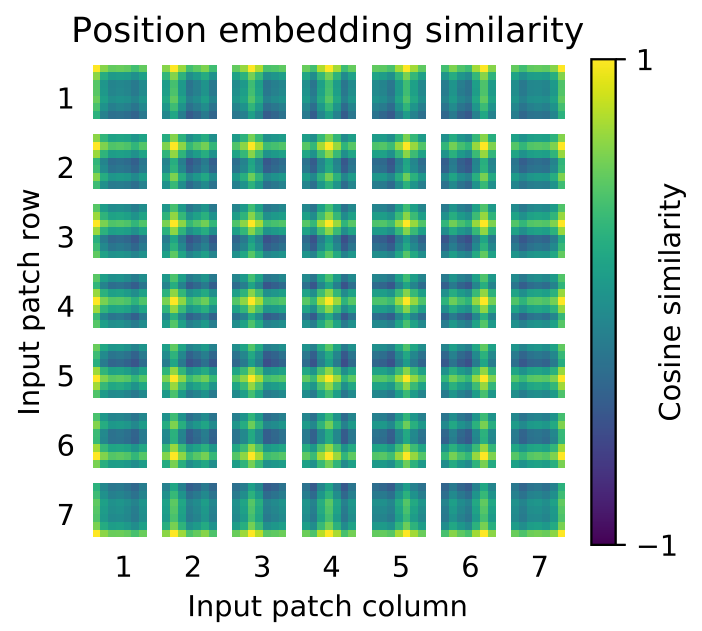
按照 Transformer 的位置编码的习惯,这个工作也使用了位置编码。引入了一个 Positional encoding \(\color{purple}{\mathbf{E}_{pos}}\) 来加入序列的位置信息,同样在这里也引入了 pos_embedding,是用一个可训练的变量。
没有采用原版 Transformer 的 \(\text{sincos}\) 编码,而是直接设置为可学习的 Positional Encoding,效果差不多。对训练好的 pos_embedding 进行可视化,如下图所示。我们发现,位置越接近,往往具有更相似的位置编码。此外,出现了行列结构;同一行 / 列中的 patch 具有相似的位置编码。
# num_patches=64,dim=1024,+1是因为多了一个cls开启解码标志
self.pos_embedding = nn.Parameter(torch.randn(1, num_patches + 1, dim))
Transformer Encoder 的前向过程
其中,第 1 个式子为上面讲到的 Patch Embedding 和 Positional Encoding 的过程。
第 2 个式子为 Transformer Encoder 的 \(\color{purple}{\text{Multi-head Self-attention, Add and Norm}}\) 的过程,重复 \(L\) 次。
第 3 个式子为 Transformer Encoder 的 \(\color{teal}{\text{Feed Forward Network, Add and Norm}}\) 的过程,重复 \(L\) 次。
作者采用的是没有任何改动的 transformer。
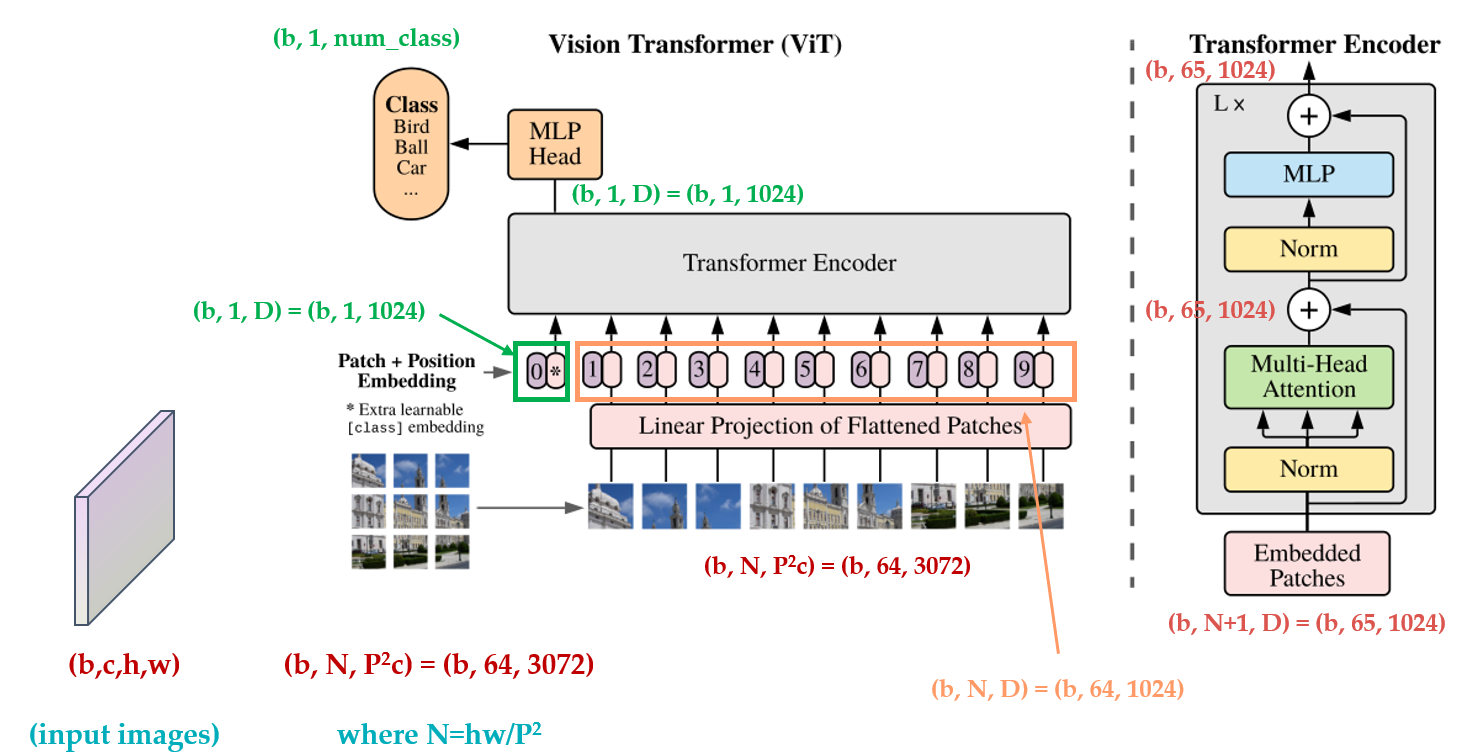
最后是一个 \(\text{MLP}\) 的 \(\text{Classification Head}\) ,整个的结构只有这些,如下图所示,为了方便读者的理解,我把变量的维度变化过程标注在了图中。
训练方法:
先在大数据集上预训练,再迁移到小数据集上面。做法是把 ViT 的 \(\color{purple}{\text{prediction head}}\) 去掉,换成一个 \(D\times K\) 的 \(\color{purple}{\text{Feed Forward Layer}}\) 。其中 \(K\) 为对应数据集的类别数。
当输入的图片是更大的 shape 时,patch size \(P\) 保持不变,则 \(N=HW/P^2\) 会增大。
ViT 可以处理任意 \(N\) 的输入,但是 Positional Encoding 是按照预训练的输入图片的尺寸设计的,所以输入图片变大之后,Positional Encoding 需要根据它们在原始图像中的位置做 2D 插值。
最后,展示下 ViT 的动态过程:
Experiments:
预训练模型使用到的数据集有:
- ILSVRC-2012 ImageNet dataset:1000 classes
- ImageNet-21k:21k classes
- JFT:18k High Resolution Images
将预训练迁移到的数据集有:
- CIFAR-10/100
- Oxford-IIIT Pets
- Oxford Flowers-102
- VTAB
作者设计了 3 种不同答小的 ViT 模型,它们分别是:
| DModel | Layers | Hidden size | MLP size | Heads | Params |
|---|---|---|---|---|---|
| ViT-Base | 12 | 768 | 3072 | 12 | 86M |
| ViT-Large | 24 | 1024 | 4096 | 16 | 307M |
| ViT-Huge | 32 | 1280 | 5120 | 16 | 632M |
ViT-L/16 代表 ViT-Large + 16 patch size \(P\)
评价指标 \(\text{Metrics}\) :
结果都是下游数据集上经过 finetune 之后的 Accuracy,记录的是在各自数据集上 finetune 后的性能。
实验 1:性能对比
实验结果如下图所示,整体模型还是挺大的,而经过大数据集的预训练后,性能也超过了当前 CNN 的一些 SOTA 结果。对比的 CNN 模型主要是:
2020 年 ECCV 的 Big Transfer (BiT) 模型,它使用大的 ResNet 进行有监督转移学习。
2020 年 CVPR 的 Noisy Student 模型,这是一个在 ImageNet 和 JFT300M 上使用半监督学习进行训练的大型高效网络,去掉了标签。
All models were trained on TPUv3 hardware。
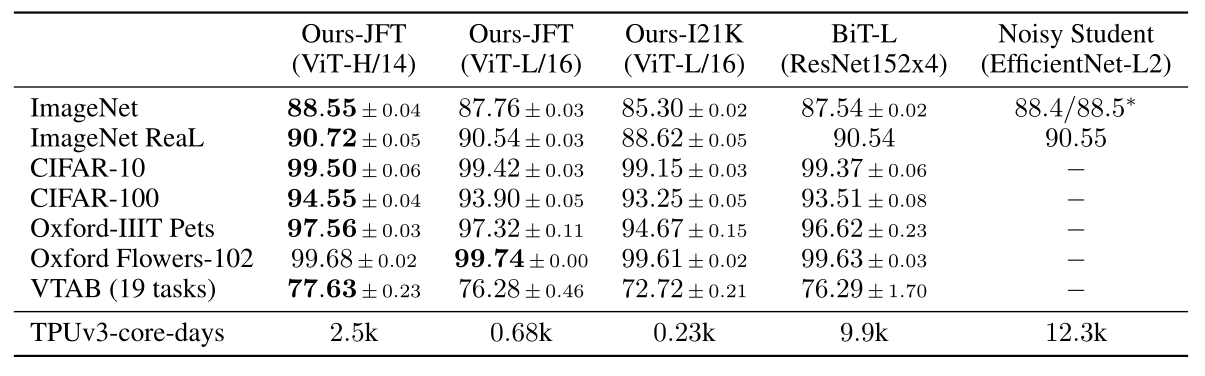
在 JFT-300M 上预先训练的较小的 ViT-L/16 模型在所有任务上都优于 BiT-L(在同一数据集上预先训练的),同时训练所需的计算资源要少得多。 更大的模型 ViT-H/14 进一步提高了性能,特别是在更具挑战性的数据集上——ImageNet, CIFAR-100 和 VTAB 数据集。 与现有技术相比,该模型预训练所需的计算量仍然要少得多。
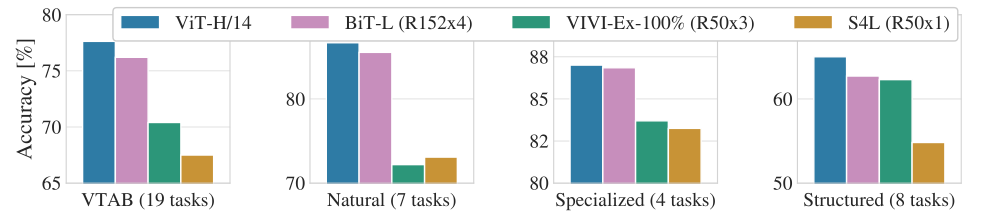
下图为 VTAB 数据集在 Natural, Specialized, 和 Structured 子任务与 CNN 模型相比的性能,ViT 模型仍然可以取得最优。
实验 2:ViT 对预训练数据的要求
ViT 对于预训练数据的规模要求到底有多苛刻?
作者分别在下面这几个数据集上进行预训练:ImageNet, ImageNet-21k, 和 JFT-300M。
结果如下图所示:
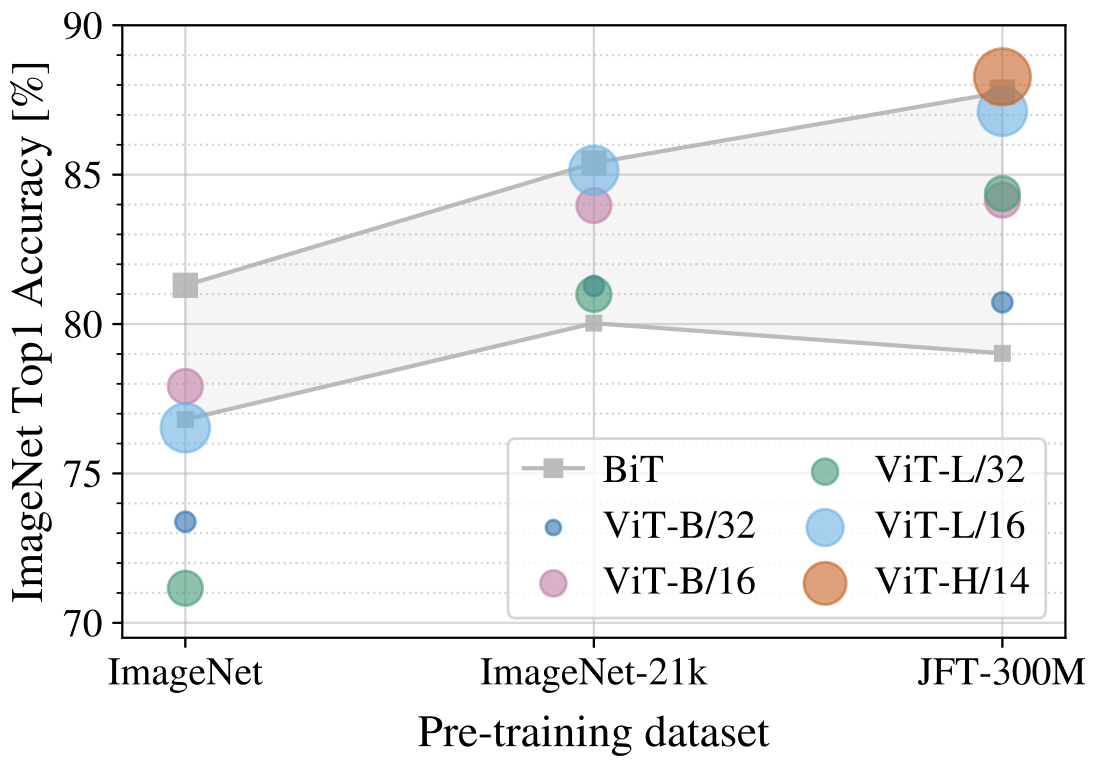
我们发现: 当在最小数据集 ImageNet 上进行预训练时,尽管进行了大量的正则化等操作,但 ViT - 大模型的性能不如 ViT-Base 模型。
但是有了稍微大一点的 ImageNet-21k 预训练,它们的表现也差不多。
只有到了 JFT 300M,我们才能看到更大的 ViT 模型全部优势。图 3 还显示了不同大小的 BiT 模型跨越的性能区域。BiT CNNs 在 ImageNet 上的表现优于 ViT(尽管进行了正则化优化),但在更大的数据集上,ViT 超过了所有的模型,取得了 SOTA。
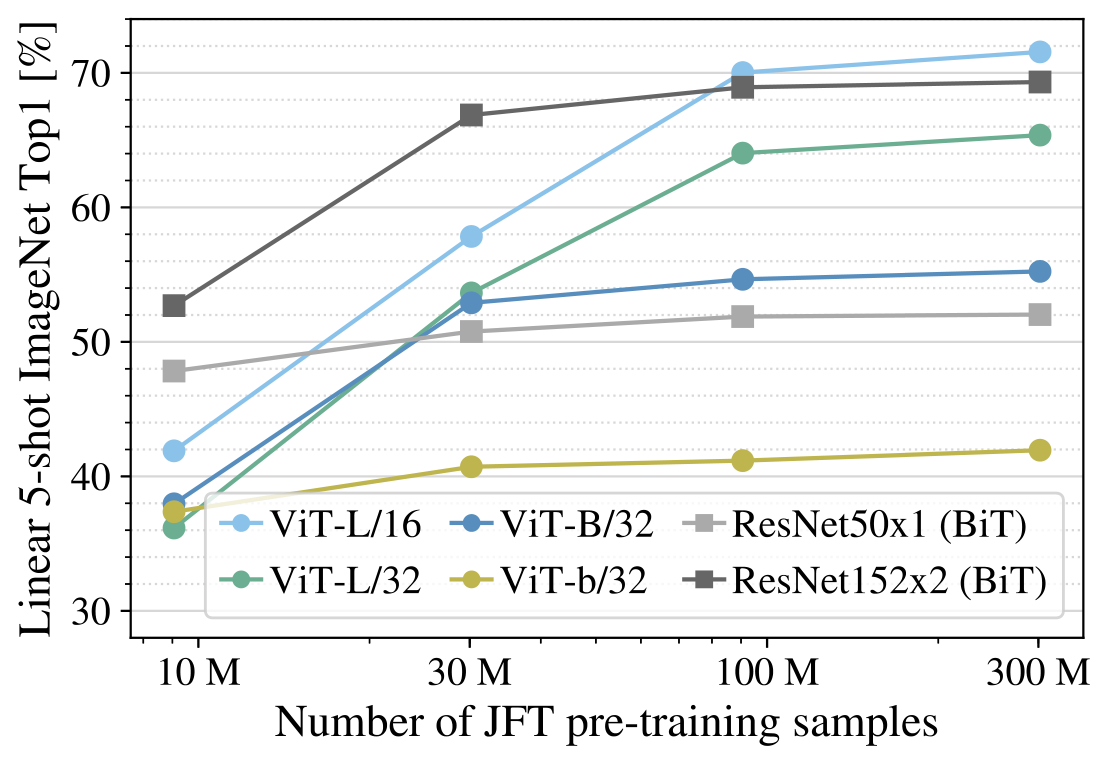
作者还进行了一个实验: 在 9M、30M 和 90M 的随机子集以及完整的 JFT300M 数据集上训练模型,结果如下图所示。 ViT 在较小数据集上的计算成本比 ResNet 高, ViT-B/32 比 ResNet50 稍快;它在 9M 子集上表现更差, 但在 90M + 子集上表现更好。ResNet152x2 和 ViT-L/16 也是如此。这个结果强化了一种直觉,即:
残差对于较小的数据集是有用的,但是对于较大的数据集,像 attention 一样学习相关性就足够了,甚至是更好的选择。
实验 3:ViT 的注意力机制 Attention
作者还给了注意力观察得到的图片块, Self-attention 使得 ViT 能够整合整个图像中的信息,甚至是最底层的信息。作者欲探究网络在多大程度上利用了这种能力。
具体来说,我们根据注意力权重计算图像空间中整合信息的平均距离,如下图所示。
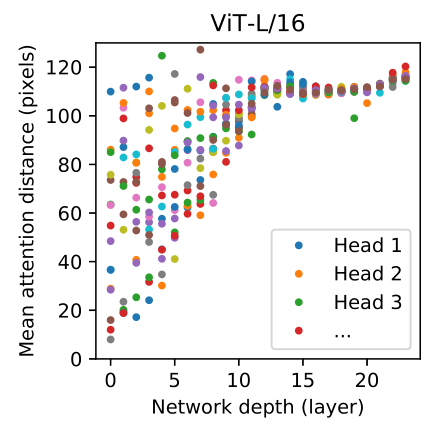
注意这里我们只使用了 attention,而没有使用 CNN,所以这里的 attention distance 相当于 CNN 的 receptive field 的大小。作者发现:在最底层,有些 head 也已经注意到了图像的大部分,说明模型已经可以 globally 地整合信息了,说明它们负责 global 信息的整合。其他的 head 只注意到图像的一小部分,说明它们负责 local 信息的整合。Attention Distance 随深度的增加而增加。
整合局部信息的 attention head 在混合模型 (有 CNN 存在) 时,效果并不好,说明它可能与 CNN 的底层卷积有着类似的功能。
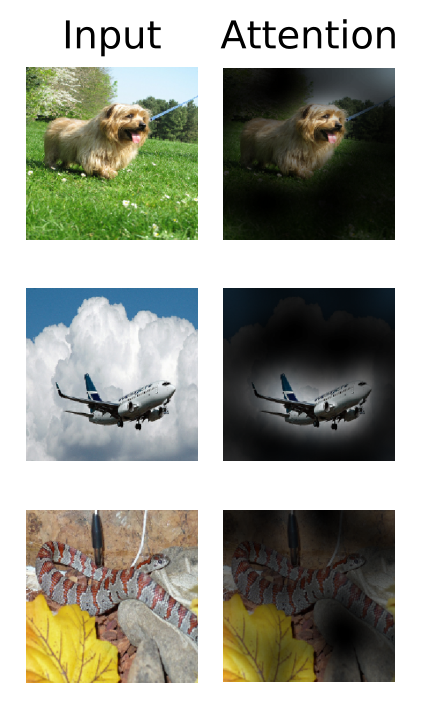
作者给出了 attention 的可视化,注意到了适合分类的位置:
- 5.2 ViT 代码解读:
代码来自:
https://github.com/google-research/vision_transformer
首先是介绍使用方法:
安装:
pip install vit-pytorch
使用:
import torch
from vit_pytorch import ViT
v = ViT(
image_size = 256,
patch_size = 32,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
img = torch.randn(1, 3, 256, 256)
mask = torch.ones(1, 8, 8).bool() # optional mask, designating which patch to attend to
preds = v(img, mask = mask) # (1, 1000)
传入参数的意义:
image_size:输入图片大小。
patch_size:论文中 patch size: \(P\) 的大小。
num_classes:数据集类别数。
dim:Transformer 的隐变量的维度。
depth:Transformer 的 Encoder,Decoder 的 Layer 数。
heads:Multi-head Attention layer 的 head 数。
mlp_dim:MLP 层的 hidden dim。
dropout:Dropout rate。
emb_dropout:Embedding dropout rate。定义残差, \(\color{purple}{\text{Feed Forward Layer}}\) 等:
class Residual(nn.Module):
def __init__(self, fn):
super().__init__()
self.fn = fn
def forward(self, x, **kwargs):
return self.fn(x, **kwargs) + x
class PreNorm(nn.Module):
def __init__(self, dim, fn):
super().__init__()
self.norm = nn.LayerNorm(dim)
self.fn = fn
def forward(self, x, **kwargs):
return self.fn(self.norm(x), **kwargs)
class FeedForward(nn.Module):
def __init__(self, dim, hidden_dim, dropout = 0.):
super().__init__()
self.net = nn.Sequential(
nn.Linear(dim, hidden_dim),
nn.GELU(),
nn.Dropout(dropout),
nn.Linear(hidden_dim, dim),
nn.Dropout(dropout)
)
def forward(self, x):
return self.net(x)
Attention 和 Transformer,注释已标注在代码中:
class Attention(nn.Module):
def __init__(self, dim, heads = 8, dim_head = 64, dropout = 0.):
super().__init__()
inner_dim = dim_head * heads
self.heads = heads
self.scale = dim ** -0.5
self.to_qkv = nn.Linear(dim, inner_dim * 3, bias = False)
self.to_out = nn.Sequential(
nn.Linear(inner_dim, dim),
nn.Dropout(dropout)
)
def forward(self, x, mask = None):
# b, 65, 1024, heads = 8
b, n, _, h = *x.shape, self.heads
# self.to_qkv(x): b, 65, 64*8*3
# qkv: b, 65, 64*8
qkv = self.to_qkv(x).chunk(3, dim = -1)
# b, 65, 64, 8
q, k, v = map(lambda t: rearrange(t, 'b n (h d) -> b h n d', h = h), qkv)
# dots:b, 65, 64, 64
dots = torch.einsum('bhid,bhjd->bhij', q, k) * self.scale
mask_value = -torch.finfo(dots.dtype).max
if mask is not None:
mask = F.pad(mask.flatten(1), (1, 0), value = True)
assert mask.shape[-1] == dots.shape[-1], 'mask has incorrect dimensions'
mask = mask[:, None, :] * mask[:, :, None]
dots.masked_fill_(~mask, mask_value)
del mask
# attn:b, 65, 64, 64
attn = dots.softmax(dim=-1)
# 使用einsum表示矩阵乘法:
# out:b, 65, 64, 8
out = torch.einsum('bhij,bhjd->bhid', attn, v)
# out:b, 64, 65*8
out = rearrange(out, 'b h n d -> b n (h d)')
# out:b, 64, 1024
out = self.to_out(out)
return out
class Transformer(nn.Module):
def __init__(self, dim, depth, heads, dim_head, mlp_dim, dropout):
super().__init__()
self.layers = nn.ModuleList([])
for _ in range(depth):
self.layers.append(nn.ModuleList([
Residual(PreNorm(dim, Attention(dim, heads = heads, dim_head = dim_head, dropout = dropout))),
Residual(PreNorm(dim, FeedForward(dim, mlp_dim, dropout = dropout)))
]))
def forward(self, x, mask = None):
for attn, ff in self.layers:
x = attn(x, mask = mask)
x = ff(x)
return x
ViT 整体:
class ViT(nn.Module):
def __init__(self, *, image_size, patch_size, num_classes, dim, depth, heads, mlp_dim, pool = 'cls', channels = 3, dim_head = 64, dropout = 0., emb_dropout = 0.):
super().__init__()
assert image_size % patch_size == 0, 'Image dimensions must be divisible by the patch size.'
num_patches = (image_size // patch_size) ** 2
patch_dim = channels * patch_size ** 2
assert num_patches > MIN_NUM_PATCHES, f'your number of patches ({num_patches}) is way too small for attention to be effective (at least 16). Try decreasing your patch size'
assert pool in {'cls', 'mean'}, 'pool type must be either cls (cls token) or mean (mean pooling)'
self.patch_size = patch_size
self.pos_embedding = nn.Parameter(torch.randn(1, num_patches + 1, dim))
self.patch_to_embedding = nn.Linear(patch_dim, dim)
self.cls_token = nn.Parameter(torch.randn(1, 1, dim))
self.dropout = nn.Dropout(emb_dropout)
self.transformer = Transformer(dim, depth, heads, dim_head, mlp_dim, dropout)
self.pool = pool
self.to_latent = nn.Identity()
self.mlp_head = nn.Sequential(
nn.LayerNorm(dim),
nn.Linear(dim, num_classes)
)
def forward(self, img, mask = None):
p = self.patch_size
# 图片分块
x = rearrange(img, 'b c (h p1) (w p2) -> b (h w) (p1 p2 c)', p1 = p, p2 = p)
# 降维(b,N,d)
x = self.patch_to_embedding(x)
b, n, _ = x.shape
# 多一个可学习的x_class,与输入concat在一起,一起输入Transformer的Encoder。(b,1,d)
cls_tokens = repeat(self.cls_token, '() n d -> b n d', b = b)
x = torch.cat((cls_tokens, x), dim=1)
# Positional Encoding:(b,N+1,d)
x += self.pos_embedding[:, :(n + 1)]
x = self.dropout(x)
# Transformer的输入维度x的shape是:(b,N+1,d)
x = self.transformer(x, mask)
# (b,1,d)
x = x.mean(dim = 1) if self.pool == 'mean' else x[:, 0]
x = self.to_latent(x)
return self.mlp_head(x)
# (b,1,num_class)